〔2〕、移动式操纵器
移动式操纵器包括手把、操纵杆等。它们可用来把系统从一个工作状态转换到另一个工作状态,或作为紧急制动之用,具有灵活、可靠等特点。
手把外形设计时,要做到手握舒适、施力方便、不产生滑动,同时还需易于控制它的动作。从手掌的结构可知,指球肌、大鱼际肌和小鱼际肌肌肉丰富,是天然减振器,而掌心部分肌肉最少。所以手柄的设计应使操作者握住手柄时掌心处于略有空隙,以减少压力和摩擦力的作用。
合理的操纵杆设计必须考虑手幅长度、手握粗度、握持状态。通常,手把长度必须接近或超过手幅长度,使手在握柄上有一个活动和选择范围。手柄的径向尺寸必须和正常的手握尺度相符或小于手握尺度。如果太粗,手就握不住手把;太细,手部肌肉会应过渡紧张而疲劳。另外手把结构必须能够保持手的自然握持状态,以使操作灵活自如。
〔3〕、按压式操纵器
按压式操纵器包括按钮、按键等。具有占地小、排列紧凑等特点。按压式操纵器常用在机床的开停、制动控制上。
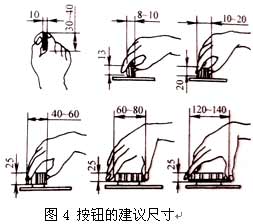
按压式操纵器的设计主要根据手指尺寸、手指端的弧形和尺寸进行设计。
按钮基本是圆形和矩形。圆形按钮直径以8~18mm为宜,矩形以10mm×10mm,10mm×15mm,15mm×20mm为宜,按钮高出盘面5~12mm,按钮间距12.5~25mm为宜。同时为了增加手感,按键形式中间以凹型为佳。
4.2脚动操纵控制器
一般在需要连续进行操作,而手又不方便,同时操纵力较大的场合选用脚动操纵。
脚动操纵控制器主要有脚踏板和脚踏扭两类。机床上几种常见的脚动操纵器如图5所示。
 文 / 佚名
文 / 佚名
转载请注明出处。

 相关文章
相关文章
 精彩导读
精彩导读





 热门资讯
热门资讯 关注我们
关注我们
